本文转自公众号王爷科技
一个分布式服务集群管理通常需要一个协调服务,提供服务注册、服务发现、配置管理、组服务等功能,而协调服务自身应是一个高可用的服务集群,ZooKeeper是广泛应用且众所周知的协调服务。协调服务自身的高可用需要选举算法来支撑,本文将讲述选举原理并以分布式服务集群NebulaBootstrap的协调服务NebulaBeacon为例详细说明协调服务的选举实现。
为什么要选NebulaBeacon来说明协调服务的选举实现?一方面是我没有读过Zookeeper的代码,更重要的另一方面是NebulaBeacon的选举实现只有两百多行代码,简单精炼,很容易讲清楚。基于高性能C++网络框架Nebula实现的分布式服务集群NebulaBootstrap是一种用C++快速构建高性能分布式服务的解决方案。
为什么要实现自己的协调服务而不直接用Zookeeper?想造个C++的轮子,整个集群都是C++服务,因为选了ZooKeeper而需要部署一套Java环境,配置也跟其他服务不是一个体系,实在不是一个好的选择。Spring Cloud有Eureka,NebulaBootstrap有NebulaBeacon,未来NebulaBootstrap会支持ZooKeeper,不过暂无时间表,还是首推NebulaBeacon。
1. 选举算法选择
Paxos算法 和ZooKeeper ZAB协议 是两种较广为人知的选举算法。ZAB协议主要用于构建一个高可用的分布式数据主备系统,例如ZooKeeper,而Paxos算法则是用于构建一个分布式的一致性状态机系统。也有很多应用程序采用自己设计的简单的选举算法,这类型简单的选举算法通常依赖计算机自身因素作为选举因子,比如IP地址、CPU核数、内存大小、自定义序列号等。
Paxos规定了四种角色(Proposer,Acceptor,Learner,以及Client)和两个阶段(Promise和Accept)。ZAB服务具有四种状态:LOOKING、FOLLOWING、LEADING、OBSERVING。NebulaBeacon是高可用分布式系统的协调服务,采用ZAP协议更为合适,不过ZAP协议还是稍显复杂了,NebulaBeacon的选举算法实现基于节点的IP地址标识,选举速度快,实现十分简单。
2. 选举相关数据结构
NebulaBeacon的选举相关数据结构非常简单:
const uint32 SessionOnlineNodes::mc_uiLeader = 0x80000000; ///< uint32最高位为1表示leader
const uint32 SessionOnlineNodes::mc_uiAlive = 0x00000007; ///< 最近三次心跳任意一次成功则认为在线
std::map<std::string, uint32> m_mapBeacon; ///< Key为节点标识,值为在线心跳及是否为leader标识
如上数据结构m_mapBeacon保存了Beacon集群各Beacon节点信息,以Beacon节点的IP地址标识为key排序,每次遍历均从头开始,满足条件(1&&2 或者1&&3)则标识为Leader:1. 节点在线;2. 已经成为Leader;3. 整个列表中不存在在线的Leader,而节点处于在线节点列表的首位。
3. Beacon选举流程
Beacon选举基于节点IP地址标识,实现非常简单且高效。
"beacon":["192.168.1.11:16000", "192.168.1.12:16000"]
进程启动时首先检查Beacon集群配置,若未配置其他Beacon节点信息,则默认只有一个Beacon节点,此时该节点在启动时自动成为Leader节点。否则,向其他Beacon节点发送一个心跳消息,等待定时器回调检查并选举出Leader节点。选举流程如下图:
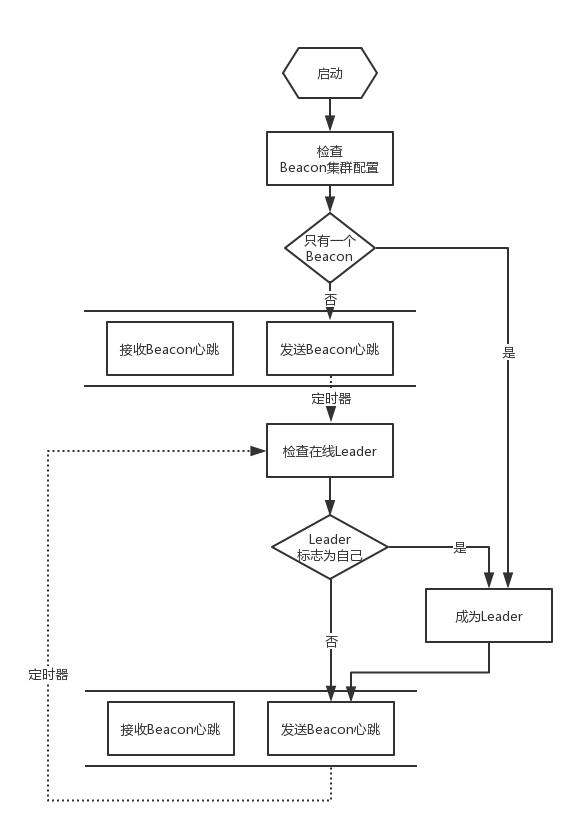
检查是否在线就是通过检查两次定时器回调之间是否收到了其他Beacon节点的心跳消息。对m_mapBeacon的遍历检查判断节点在线情况,对已离线的Leader节点置为离线状态,若当前节点应成为Leader节点则成为Leader节点。
4. Beacon节点间选举通信
Beacon节点间的选举通信与节点心跳合为一体,这样做的好处是当leader节点不可用时,fllower节点立刻可以成为leader节点,选举过程只需每个fllower节点遍历自己内存中各Beacon节点的心跳信息即可,无须在发现leader不在线才发起选举,更快和更好地保障集群的高可用性。

Beacon节点心跳信息带上了leader节点作为协调服务产生的新数据,fllower节点在接收心跳的同时完成了数据同步,保障任意一个fllower成为leader时已获得集群所有需协调的信息并可随时切换为leader。除定时器触发的心跳带上协调服务产生的新数据之外,leader节点产生新数据的同时会立刻向fllower发送心跳。
5. Beacon选举实现
Beacon心跳协议proto:
message Election
{
int32 is_leader = 1; ///< 是否主节点
uint32 last_node_id = 2; ///< 上一个生成的节点ID
repeated uint32 added_node_id = 3; ///< 新增已使用的节点ID
repeated uint32 removed_node_id = 4; ///< 删除已废弃的节点ID
}
检查Beacon配置,若只有一个Beacon节点则自动成为Leader:
void SessionOnlineNodes::InitElection(const neb::CJsonObject& oBeacon)
{
neb::CJsonObject oBeaconList = oBeacon;
for (int i = 0; i < oBeaconList.GetArraySize(); ++i)
{
m_mapBeacon.insert(std::make_pair(oBeaconList(i) + ".1", 0));
}
if (m_mapBeacon.size() == 0)
{
m_bIsLeader = true;
}
else if (m_mapBeacon.size() == 1
&& GetNodeIdentify() == m_mapBeacon.begin()->first)
{
m_bIsLeader = true;
}
else
{
SendBeaconBeat();
}
}
发送Beacon心跳:
void SessionOnlineNodes::SendBeaconBeat()
{
LOG4_TRACE("");
MsgBody oMsgBody;
Election oElection;
if (m_bIsLeader)
{
oElection.set_is_leader(1);
oElection.set_last_node_id(m_unLastNodeId);
for (auto it = m_setAddedNodeId.begin(); it != m_setAddedNodeId.end(); ++it)
{
oElection.add_added_node_id(*it);
}
for (auto it = m_setRemovedNodeId.begin(); it != m_setRemovedNodeId.end(); ++it)
{
oElection.add_removed_node_id(*it);
}
}
else
{
oElection.set_is_leader(0);
}
m_setAddedNodeId.clear();
m_setRemovedNodeId.clear();
oMsgBody.set_data(oElection.SerializeAsString());
for (auto iter = m_mapBeacon.begin(); iter != m_mapBeacon.end(); ++iter)
{
if (GetNodeIdentify() != iter->first)
{
SendTo(iter->first, neb::CMD_REQ_LEADER_ELECTION, GetSequence(), oMsgBody);
}
}
}
接收Beacon心跳:
void SessionOnlineNodes::AddBeaconBeat(const std::string& strNodeIdentify, const Election& oElection)
{
if (!m_bIsLeader)
{
if (oElection.last_node_id() > 0)
{
m_unLastNodeId = oElection.last_node_id();
}
for (int32 i = 0; i < oElection.added_node_id_size(); ++i)
{
m_setNodeId.insert(oElection.added_node_id(i));
}
for (int32 j = 0; j < oElection.removed_node_id_size(); ++j)
{
m_setNodeId.erase(m_setNodeId.find(oElection.removed_node_id(j)));
}
}
auto iter = m_mapBeacon.find(strNodeIdentify);
if (iter == m_mapBeacon.end())
{
uint32 uiBeaconAttr = 1;
if (oElection.is_leader() != 0)
{
uiBeaconAttr |= mc_uiLeader;
}
m_mapBeacon.insert(std::make_pair(strNodeIdentify, uiBeaconAttr));
}
else
{
iter->second |= 1;
if (oElection.is_leader() != 0)
{
iter->second |= mc_uiLeader;
}
}
}
检查在线leader,成为leader:
void SessionOnlineNodes::CheckLeader()
{
LOG4_TRACE("");
std::string strLeader;
for (auto iter = m_mapBeacon.begin(); iter != m_mapBeacon.end(); ++iter)
{
if (mc_uiAlive & iter->second)
{
if (mc_uiLeader & iter->second)
{
strLeader = iter->first;
}
else if (strLeader.size() == 0)
{
strLeader = iter->first;
}
}
else
{
iter->second &= (~mc_uiLeader);
}
uint32 uiLeaderBit = mc_uiLeader & iter->second;
iter->second = ((iter->second << 1) & mc_uiAlive) | uiLeaderBit;
if (iter->first == GetNodeIdentify())
{
iter->second |= 1;
}
}
if (strLeader == GetNodeIdentify())
{
m_bIsLeader = true;
}
}
6. Beacon节点切换leader
通过Nebula集群的命令行管理工具nebcli可以很方便的查看Beacon节点状态,nebcli的使用说明见Nebcli项目的README。下面启动三个Beacon节点,并反复kill掉Beacon进程和重启,查看leader节点的切换情况。
启动三个beacon节点:
nebcli): show beacon
node is_leader is_online
192.168.157.176:16000.1 yes yes
192.168.157.176:17000.1 no yes
192.168.157.176:18000.1 no yes
kill掉leader节点:
nebcli): show beacon
node is_leader is_online
192.168.157.176:16000.1 no no
192.168.157.176:17000.1 yes yes
192.168.157.176:18000.1 no yes
kill掉fllower节点:
nebcli): show beacon
node is_leader is_online
192.168.157.176:16000.1 no no
192.168.157.176:17000.1 yes yes
192.168.157.176:18000.1 no no
重启被kill掉的两个节点:
nebcli): show beacon
node is_leader is_online
192.168.157.176:16000.1 no yes
192.168.157.176:17000.1 yes yes
192.168.157.176:18000.1 no yes
fllower节点在原leader节点不可用后成为leader节点,且只要不宕机则一直会是leader节点,即使原leader节点重新变为可用状态也不会再次切换。
7. 结束
开发Nebula框架目的是致力于提供一种基于C++快速构建高性能的分布式服务。
 发起投票
发起投票

 技术讨论
技术讨论








 加好友
加好友 发消息
发消息 2019-1-24 14:42:15 |
2019-1-24 14:42:15 |
 赞(
赞( 操作
操作
{kind=link}
{kind=link}